
21.03.2008
Servoboard S8IO5-RT
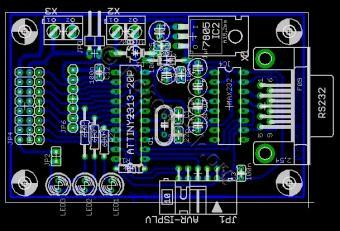
S8IO5-S/ 092007 auf Einseitiger Platine 80x50mm Serial Port, Anschluss für 8
Servos und 5 I/O
Download: Controller-Treiber S8IO5

Download Servoboard 082007 (Eagle Layout)
Bauteilliste
1 x Board-Platine
1 x IC ATTiny2313 DIL-20
1 x IC-Fassung 20pol.
1 x IC MAX232 CPE
1 x IC-Fassung 16pol.
1 x IC 78S05 TO-220 Spannungsregler 2A
1 x Quarz 7.3728MHz
2 x Kondensator 22p
3 x Kondensator 100nF
1 x Elko 100uF/25V
1 x Elko 10uF/25V
4 x Elko 1uF/25V
1 x Widerstand 10k
3 x Widerstand 330Ohm
3 x LED
1 Diode 1N4007
1 Diode 1N4148
2 x Anschluss 2pol. RM 5,08
1 x Stiftleiste 40 Pin
1x Stiftleiste 2x40 Pin
1 x Sub-D-Buchse 90` 10pol.
Reichelt Liste
http://www.reichelt.de/?ACTION=20;AWKID=121888;PROVID=2084
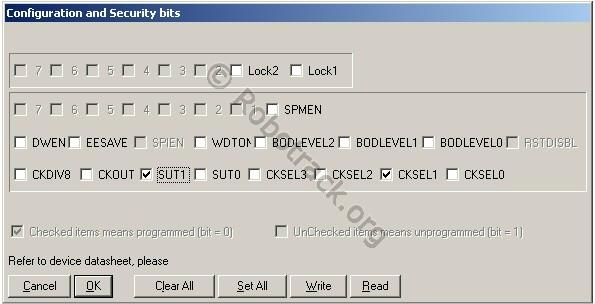
PonyProg2000 ab Version 2.06f (Die Vorherigen kennen den Tiny 2313 nicht)
Servo und I/O Controller S8IO Treiber für ATTiny2313
Servo 0 und 8 sprechen beide das Servo-0 an PORTB0 an.
Drehbereich normal: von 0.8 bis 2.2ms Hex-Wert
PortB0 Servo-0 0x23 0x53 0x00 0x(Servoposition von 01 bis FF)
PortB1 Servo-1 0x23 0x53 0x01 0x(Servoposition von 01 bis FF)
PortB2 Servo-2 0x23 0x53 0x02 0x(Servoposition von 01 bis FF)
PortB3 Servo-3 0x23 0x53 0x03 0x(Servoposition von 01 bis FF)
PortB4 Servo-4 0x23 0x53 0x04 0x(Servoposition von 01 bis FF)
PortB5 Servo-5 0x23 0x53 0x05 0x(Servoposition von 01 bis FF)
PortB6 Servo-6 0x23 0x53 0x06 0x(Servoposition von 01 bis FF)
PortB7 Servo-7 0x23 0x53 0x07 0x(Servoposition von 01 bis FF)
Drehbereich erweiterter von 0.5 bis 2.5ms
PortB0 Servo-8 0x23 0x53 0x08 0x(Servoposition von 01 bis FF)
PortB1 Servo-9 0x23 0x53 0x09 0x(Servoposition von 01 bis FF)
PortB2 Servo-10 0x23 0x53 0x0A 0x(Servoposition von 01 bis FF)
PortB3 Servo-11 0x23 0x53 0x0B 0x(Servoposition von 01 bis FF)
PortB4 Servo-12 0x23 0x53 0x0C 0x(Servoposition von 01 bis FF)
PortB5 Servo-13 0x23 0x53 0x0D 0x(Servoposition von 01 bis FF)
PortB6 Servo-14 0x23 0x53 0x0E 0x(Servoposition von 01 bis FF)
PortB7 Servo-15 0x23 0x53 0x0F 0x(Servoposition von 01 bis FF)
Erweiterter Drehbereich bei 4 MHz
EIN = 0x23 0x43 0x53 0x01 0xD8 0xF0 0xF8 0x30
Erweiterter Drehbereich bei 4 MHz
AUS = 0x23 0x43 0x53 0x01 0xFF 0xFF
5 I/O Pins als Ein- und Ausgänge nutzbar
PortD2 I/O-1 0x23 0x4F 0x04 0x(EIN 04 AUS 00)
PortD3 I/O-2 0x23 0x4F 0x08 0x(EIN 08 AUS 00)
PortD4 I/O-3 0x23 0x4F 0x12 0x(EIN 12 AUS 00)
PortD5 I/O-4 0x23 0x4F 0x20 0x(EIN 20 AUS 00)
PortD6 I/O-5 0x23 0x4F 0x40 0x(EIN 40 AUS 00)
Die 5 I/O Pins sind auch beim Treiber S8IO5-Taster als Taster nutzbar
PortD2 I/O-1 0x23 0x50 0x04 0x04 0x00 0xFF
PortD3 I/O-2 0x23 0x50 0x08 0x08 0x00 0xFF
PortD4 I/O-3 0x23 0x50 0x12 0x12 0x00 0xFF
PortD5 I/O-4 0x23 0x50 0x20 0x20 0x00 0xFF
PortD6 I/O-5 0x23 0x50 0x40 0x40 0x00 0xFF
Projekt Legende
Soweit bekannt Ursprünglich: ©
[B]weiter Entwickelt: ©
Weblinks:
Hinweis:
Diese Seite wurde zuletzt bearbeitet am: 12 März 2017

Copyright © 2007 www.robotrack.org
S8IO5-S/ 092007 auf Einseitiger Platine 80x50mm Serial Port, Anschluss für 8
Servos und 5 I/O
  |
|
|

Download: Controller-Treiber S8IO5
Download Servoboard 082007 (Eagle Layout)
Bauteilliste
1 x Board-Platine
1 x IC ATTiny2313 DIL-20
1 x IC-Fassung 20pol.
1 x IC MAX232 CPE
1 x IC-Fassung 16pol.
1 x IC 78S05 TO-220 Spannungsregler 2A
1 x Quarz 7.3728MHz
2 x Kondensator 22p
3 x Kondensator 100nF
1 x Elko 100uF/25V
1 x Elko 10uF/25V
4 x Elko 1uF/25V
1 x Widerstand 10k
3 x Widerstand 330Ohm
3 x LED
1 Diode 1N4007
1 Diode 1N4148
2 x Anschluss 2pol. RM 5,08
1 x Stiftleiste 40 Pin
1x Stiftleiste 2x40 Pin
1 x Sub-D-Buchse 90` 10pol.
Reichelt Liste
http://www.reichelt.de/?ACTION=20;AWKID=121888;PROVID=2084
PonyProg2000 ab Version 2.06f (Die Vorherigen kennen den Tiny 2313 nicht)
Servo und I/O Controller S8IO Treiber für ATTiny2313
Servo 0 und 8 sprechen beide das Servo-0 an PORTB0 an.
Drehbereich normal: von 0.8 bis 2.2ms Hex-Wert
PortB0 Servo-0 0x23 0x53 0x00 0x(Servoposition von 01 bis FF)
PortB1 Servo-1 0x23 0x53 0x01 0x(Servoposition von 01 bis FF)
PortB2 Servo-2 0x23 0x53 0x02 0x(Servoposition von 01 bis FF)
PortB3 Servo-3 0x23 0x53 0x03 0x(Servoposition von 01 bis FF)
PortB4 Servo-4 0x23 0x53 0x04 0x(Servoposition von 01 bis FF)
PortB5 Servo-5 0x23 0x53 0x05 0x(Servoposition von 01 bis FF)
PortB6 Servo-6 0x23 0x53 0x06 0x(Servoposition von 01 bis FF)
PortB7 Servo-7 0x23 0x53 0x07 0x(Servoposition von 01 bis FF)
Drehbereich erweiterter von 0.5 bis 2.5ms
PortB0 Servo-8 0x23 0x53 0x08 0x(Servoposition von 01 bis FF)
PortB1 Servo-9 0x23 0x53 0x09 0x(Servoposition von 01 bis FF)
PortB2 Servo-10 0x23 0x53 0x0A 0x(Servoposition von 01 bis FF)
PortB3 Servo-11 0x23 0x53 0x0B 0x(Servoposition von 01 bis FF)
PortB4 Servo-12 0x23 0x53 0x0C 0x(Servoposition von 01 bis FF)
PortB5 Servo-13 0x23 0x53 0x0D 0x(Servoposition von 01 bis FF)
PortB6 Servo-14 0x23 0x53 0x0E 0x(Servoposition von 01 bis FF)
PortB7 Servo-15 0x23 0x53 0x0F 0x(Servoposition von 01 bis FF)
Erweiterter Drehbereich bei 4 MHz
EIN = 0x23 0x43 0x53 0x01 0xD8 0xF0 0xF8 0x30
Erweiterter Drehbereich bei 4 MHz
AUS = 0x23 0x43 0x53 0x01 0xFF 0xFF
5 I/O Pins als Ein- und Ausgänge nutzbar
PortD2 I/O-1 0x23 0x4F 0x04 0x(EIN 04 AUS 00)
PortD3 I/O-2 0x23 0x4F 0x08 0x(EIN 08 AUS 00)
PortD4 I/O-3 0x23 0x4F 0x12 0x(EIN 12 AUS 00)
PortD5 I/O-4 0x23 0x4F 0x20 0x(EIN 20 AUS 00)
PortD6 I/O-5 0x23 0x4F 0x40 0x(EIN 40 AUS 00)
Die 5 I/O Pins sind auch beim Treiber S8IO5-Taster als Taster nutzbar
PortD2 I/O-1 0x23 0x50 0x04 0x04 0x00 0xFF
PortD3 I/O-2 0x23 0x50 0x08 0x08 0x00 0xFF
PortD4 I/O-3 0x23 0x50 0x12 0x12 0x00 0xFF
PortD5 I/O-4 0x23 0x50 0x20 0x20 0x00 0xFF
PortD6 I/O-5 0x23 0x50 0x40 0x40 0x00 0xFF
Projekt Legende
Soweit bekannt Ursprünglich: ©
[B]weiter Entwickelt: ©
Weblinks:
Hinweis:
Diese Seite wurde zuletzt bearbeitet am: 12 März 2017
Copyright © 2007 www.robotrack.org